9/8にMEGAWEBで行われた「俺のランチボックスミニ」に出場するために作成した二足歩行のランチボックスミニロボの作り方です
俺のランチボックスミニでの勇姿
https://www.facebook.com/tamiyahf/videos/695430860972080/
こういうマシンを俺も作ってみたい( ・`ω・´) pic.twitter.com/bl7MYbDAvZ
— はかせ(ZZ9X) (@hatenalabo) September 8, 2019
用意するもの
- ランチボックスミニ(普通に走るもの)
- 適当なメカ(軽いもの推奨)
- 単3電池8本
- アッパーコネクトバー
- ユニバーサルプレートセット
- ユニバーサルアームセット
- ロングユニバーサルアームセット
- イーグル ALソリッドアクスルT3-01用40T
- ピンクのホイール(タミチャレの景品でよく貰うやつ)
- 3×10mmネジ付き高ナット(別名: 六角オネジメネジスペーサ) (×2)
- 2.5mmドリル刃とピンバイス
あると良いかもしれないもの
- 皿モミカッター
- 3×10mm皿ビス (×4)
- マルチパーパスドライバーフィギュア(の手)
- T3-01のライトマウントパーツ
- 緑のLED
前準備
アッパーコネクトバーを説明書見ながら組み付けます
クランク作成
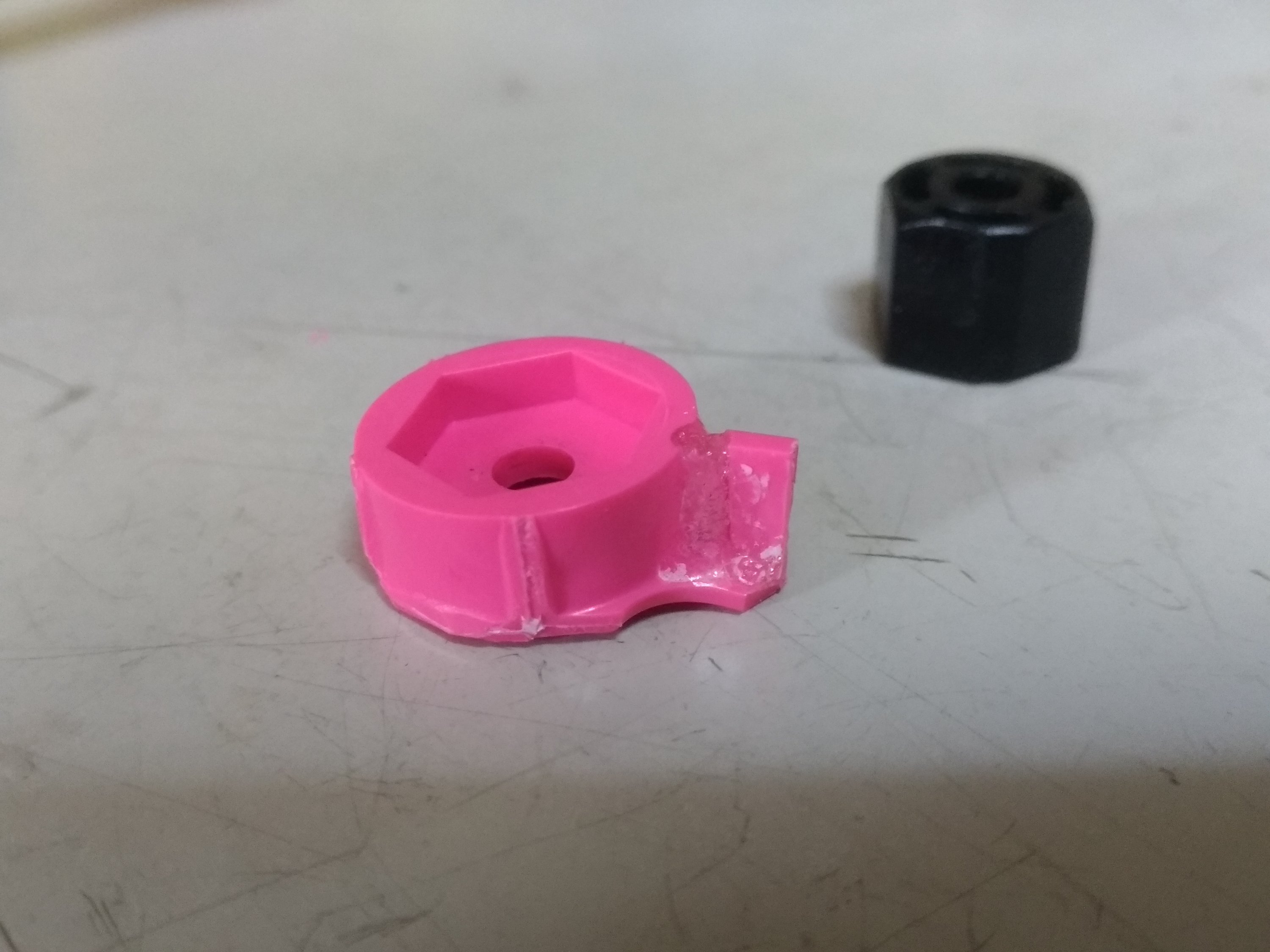
まず歩行するロボの基本クランクの作成ですが、SW-01の駆動出力はお馴染み12mm六角ハブですので、そこら辺に余ってるツーリングホイールを元に作成します
と言う訳で白羽の矢が立ったピンクのホイール(タミチャレの景品でよく貰うやつ)の6角ハブに当たらないギリギリの場所に2.5mmドリルで穴を空けます
ホイールの面が斜めってますが、車軸に真っ直ぐに!

おっと、僕は後で気づきましたが裏側のリブ部分が切断されてしまうと強度が心配なので先に瞬間接着剤やプラリペア等で穴の周りを盛っておくと良いでしょう
穴が空いたらホイールの余計な部分をカットします
(よく切れる薄刃ニッパーがあればザクザクいけます)

こんな感じでビス穴空けた部分のリムだけが残るようにカット
クランク穴付近の補強わかりますか?
リアデフロック
デフが効いてしまうと片足出持ち上げることができず、クランクが同じ位相で動いてしまうのでロックします
接着剤等で固めてもいいですが、僕はたまたま落ちていたイーグルのALソリッドアクスルを使いました(写真左下アルミ色のギア)
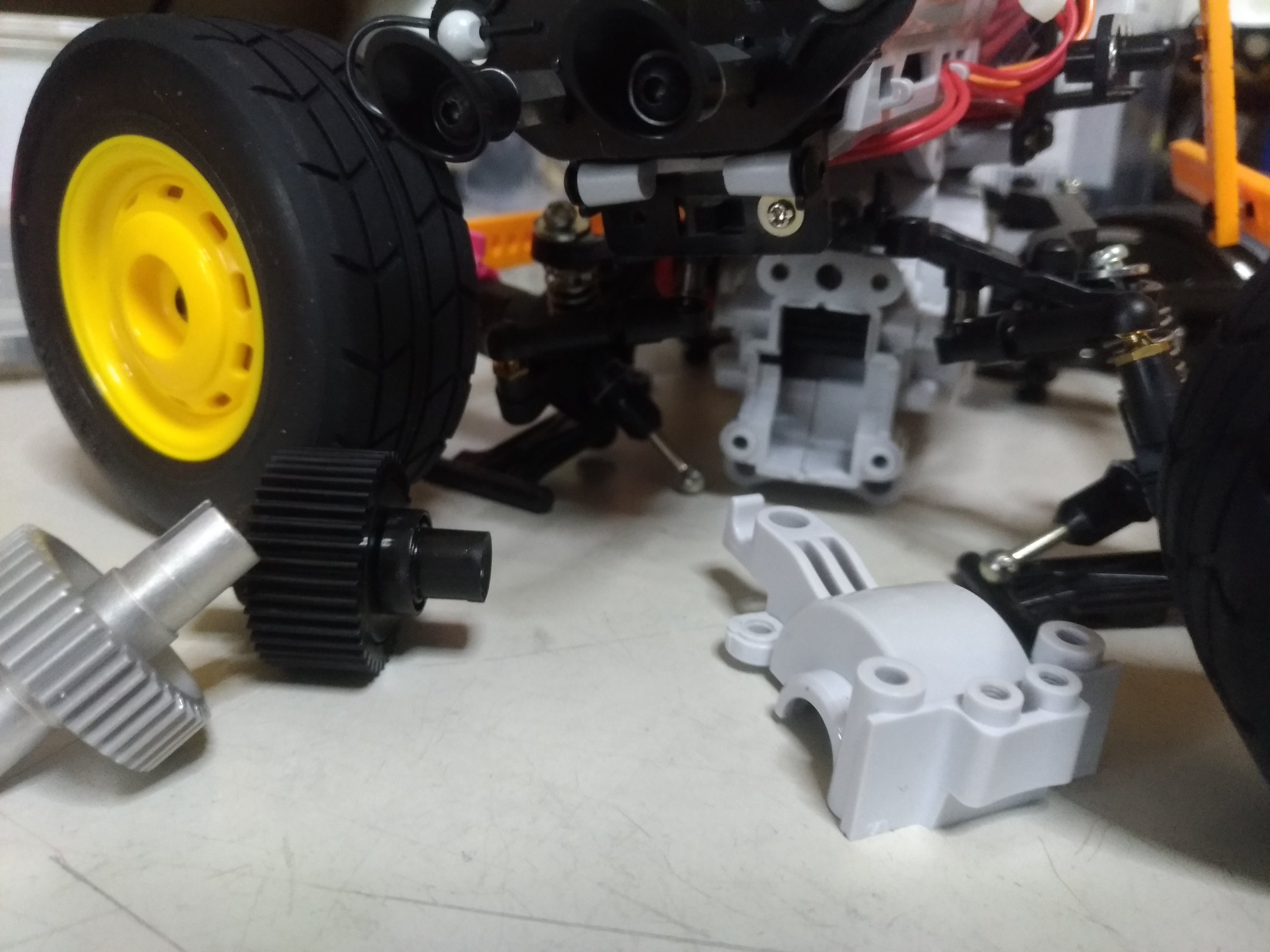
デフの交換はリアデフのカバーを開けるだけで出来そうな気がしますが、実際はアッパーデッキに引っかかっているためアッパーデッキも外す必要があります
(もうちょっとで神設計だったのに、惜しい、、)
足(膝下)の作成
ユニバーサルアーム(オレンジ色の棒状の板)とユニバーサルプレート(くすんだグレーの板状の板)を適当にカットしたものを組み合わせて作ります
ユニバーサルプレートは大体 幅100mm高さ40mm くらいの大きさで足っぽい形状にカットします(×2)
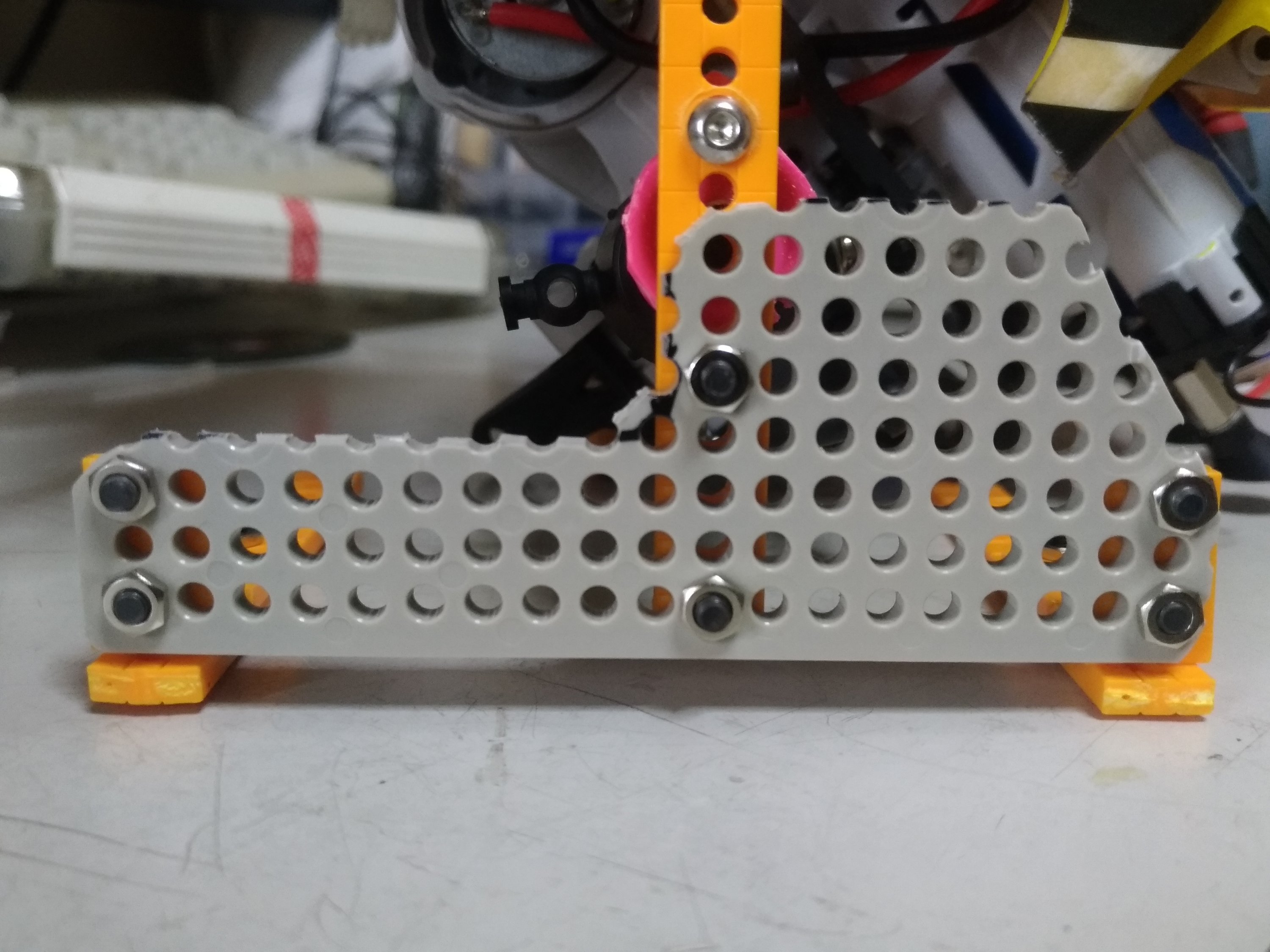
これにユニバーサルアーム(170mm)をそのまま膝部分としてビス(3×10mm)2箇所で取り付けます
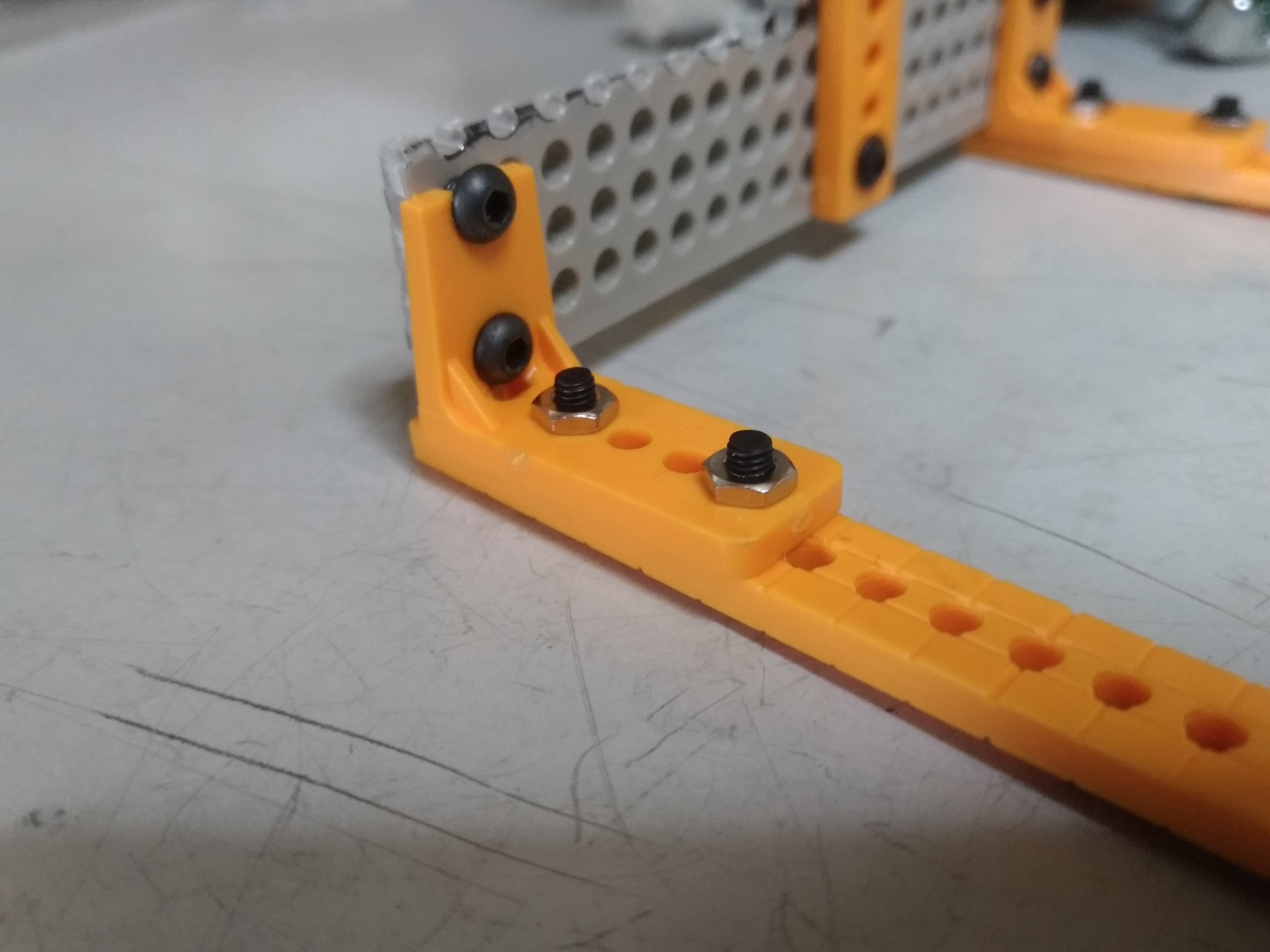
加えて足のプレート前後両端に倒れ防止のための棒をユニバーサルアームに付属のL字アングルを介して側面底面それぞれビス2本ずつで取り付けます
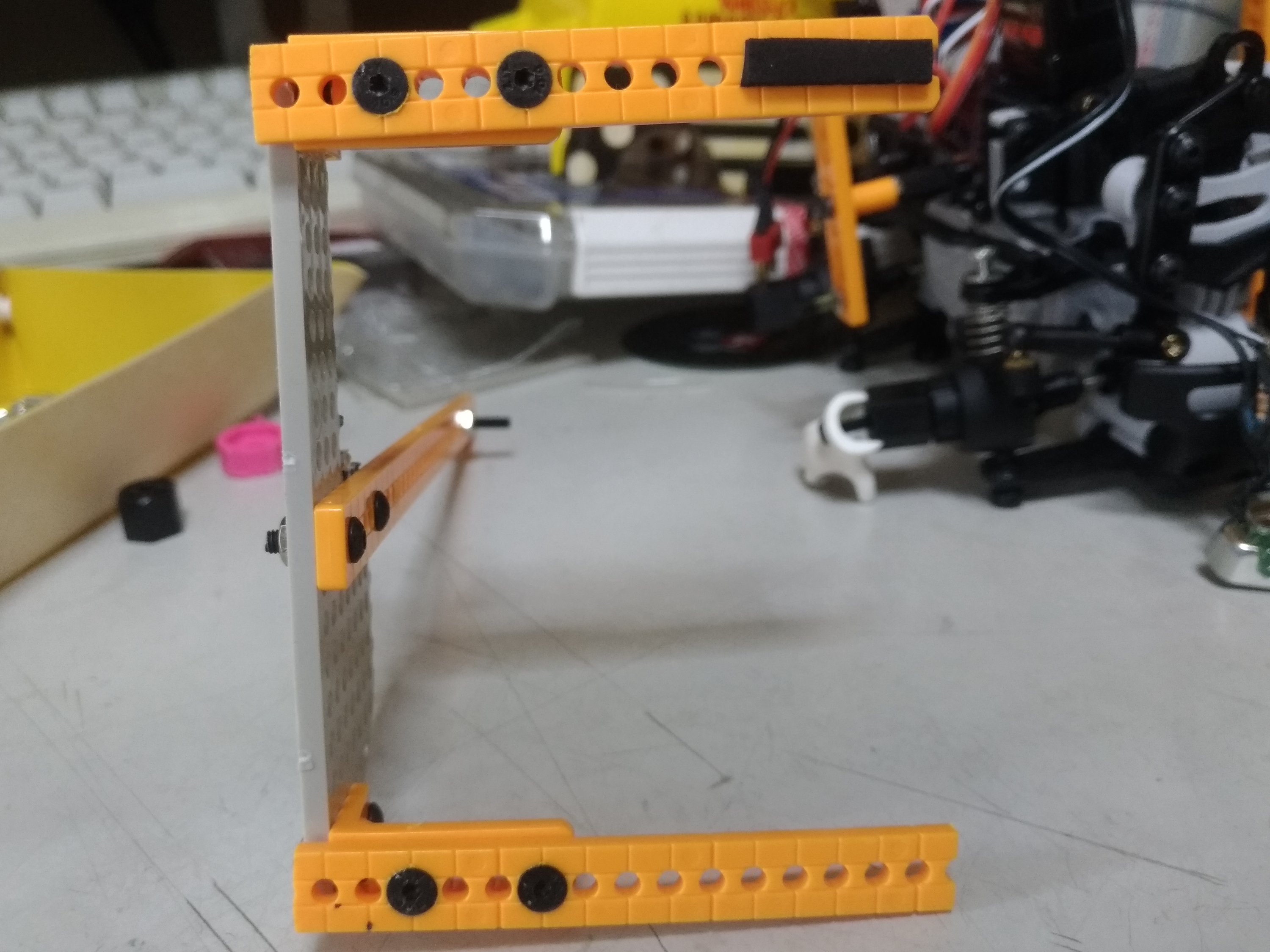
底面のビスは皿モミカッターがあれば皿ビスを使用すると良いでしょう
倒れ防止棒は 前75mm 後ろ80mm としています
(もう少し長くしたいところですが左右で干渉の恐れがあるため現バージョンではこの長さで)
角度を変えて見てみるとこんな感じです
足(腿部分)の作成
続いて腿部分の作成です
まずは付け根をボディマウント前方の皿ビスがついていた部分に作ります
皿ビスを外し代わりに3×10mmのネジ付き高ナットを埋め込みます
(写真ではプラ製ですが一般的な金属製でも問題ありません)

ここに50mmにカットしたユニバーサルアームを付属のスペーサ大を噛まして3×15mmビスと3mmナットで取り付けます
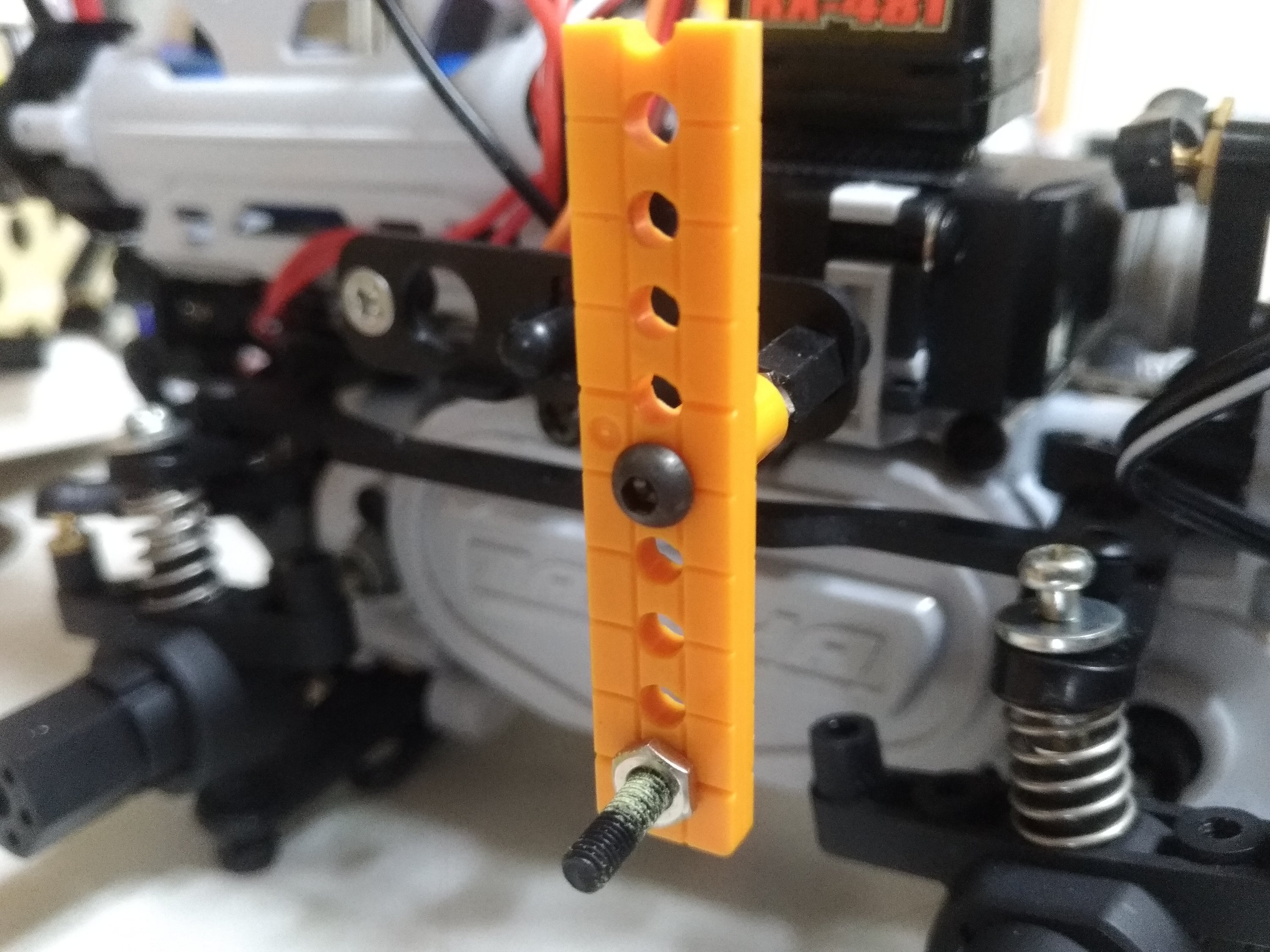
あと、可動軸から20mm距離の穴に3×12mmのビスをナットで固定し、膝の軸も作っておきます
このときビスを高ナットに対してきつく締めるのではなく、スペーサと高ナットの間に入れたナットと高ナットを共締めして、腿のユニバーサルアームが稼働するようにしてください
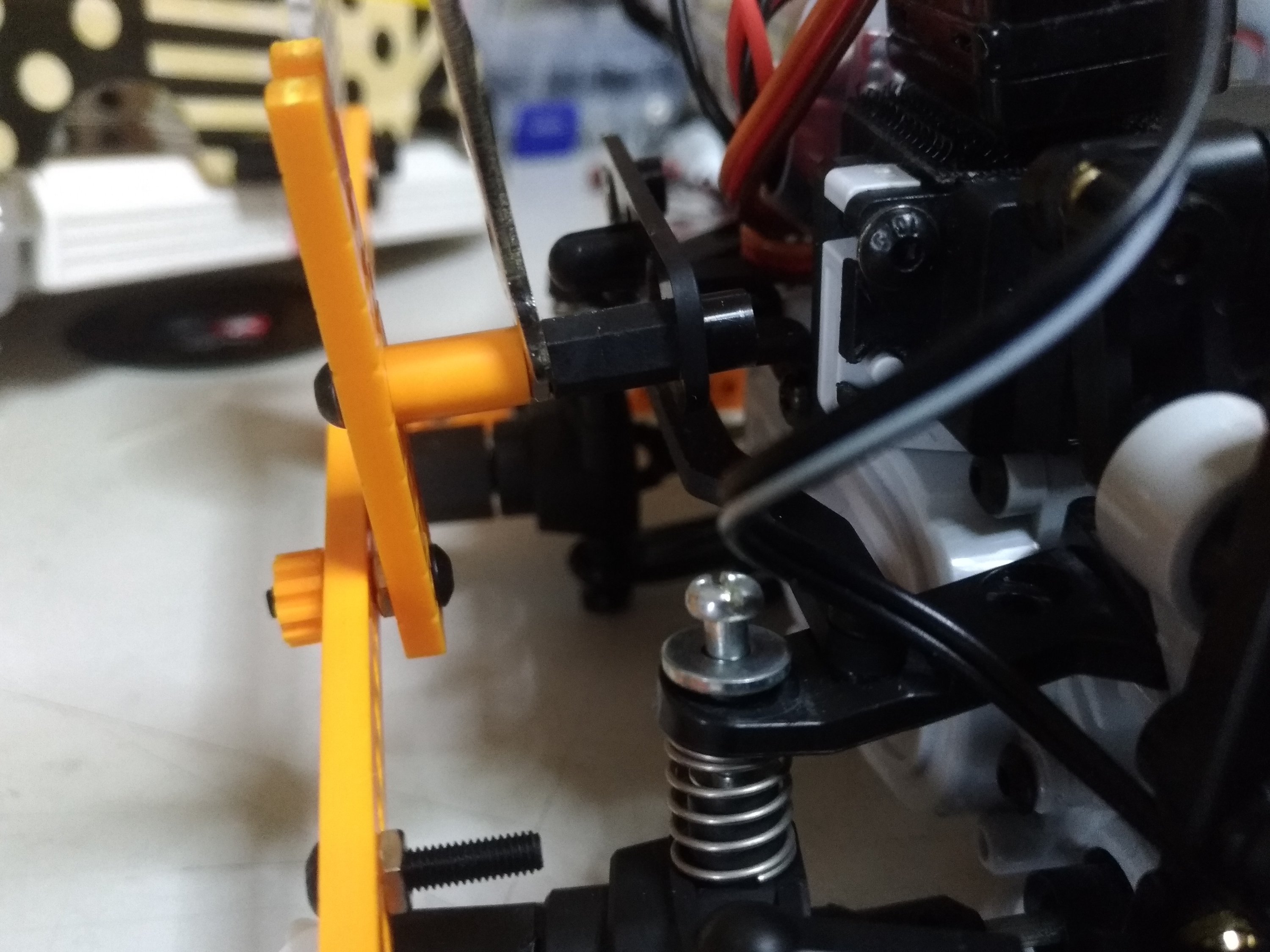
足の結合
膝下と腿 2つの足パーツおよびクランクを結合します
クランクは下から9番目の穴に3×12mmビスで
腿は下から23番目の穴に先程生やしたビスに付属の手締めナイロンナットで
それぞれ結合します(締めすぎ注意です!軽く動く様にスキマをあけて途中で止めてください)
これでもう歩けるようになりましたが、せっかくなのてもう少しディティールアップしてみたいと思います
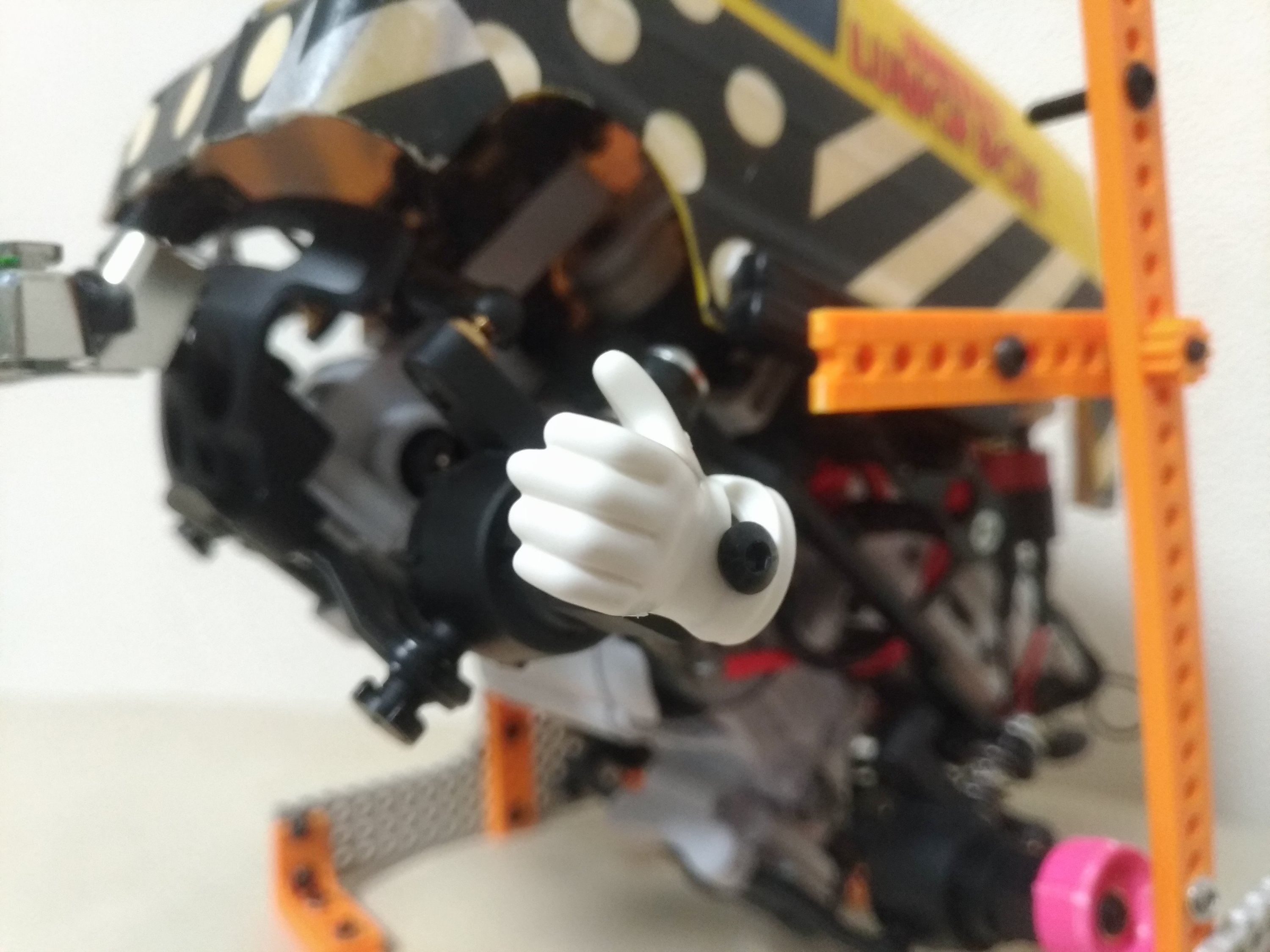
手と顔っぽいもの
ロボットなのでやっぱり手があった方が良いですよね!?
紙でも薄っぺらいプラ板でもいいんですが、ちょうど前日購入したマルチパーパスドライバーフィギュアと言うものがありまして、手首の部分にちょうどいい穴が空いていたのでボルトオンしてみました!
あと、やっぱり顔も欲しい、出来れば目を光らせたい!
ということでライトマウントをダンシングライダーから引っ剥がしてきまして、バンパーにナイロンバンドで縛り付けました
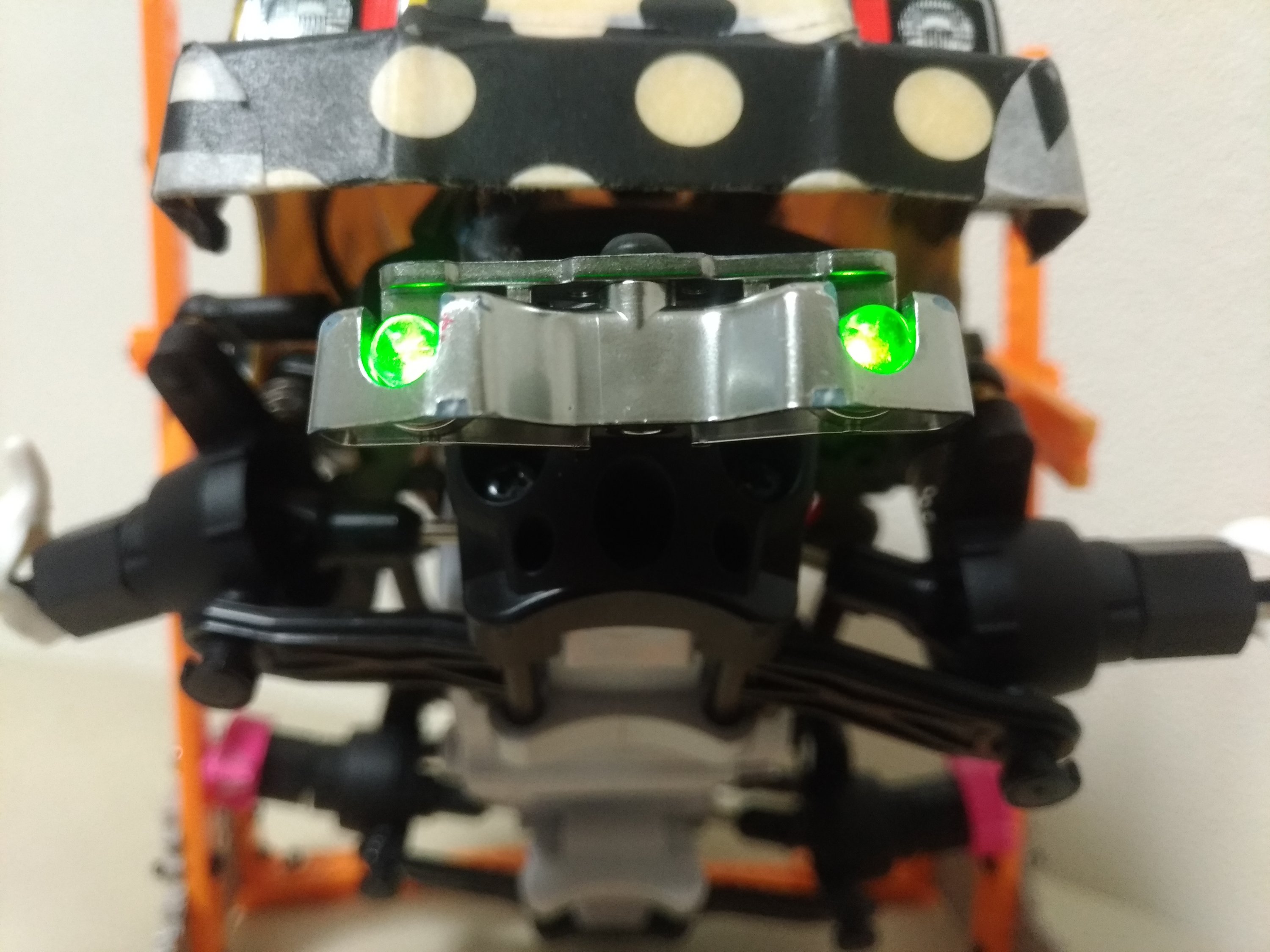
ランチボックスボディのフロント部分が顔じゃないの??と思われる方がほとんどかとは思いますがコチラが顔ですのであしからず
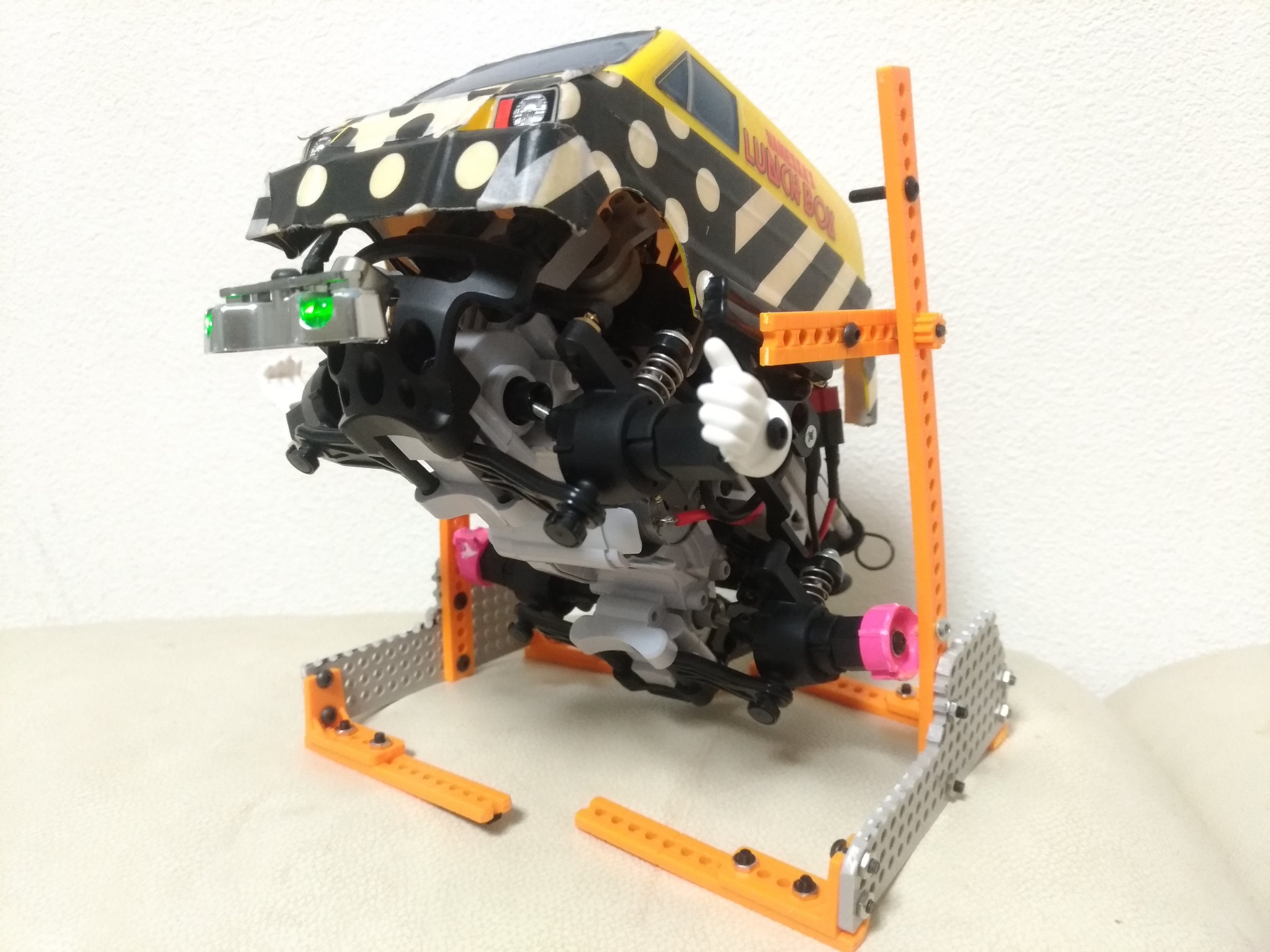
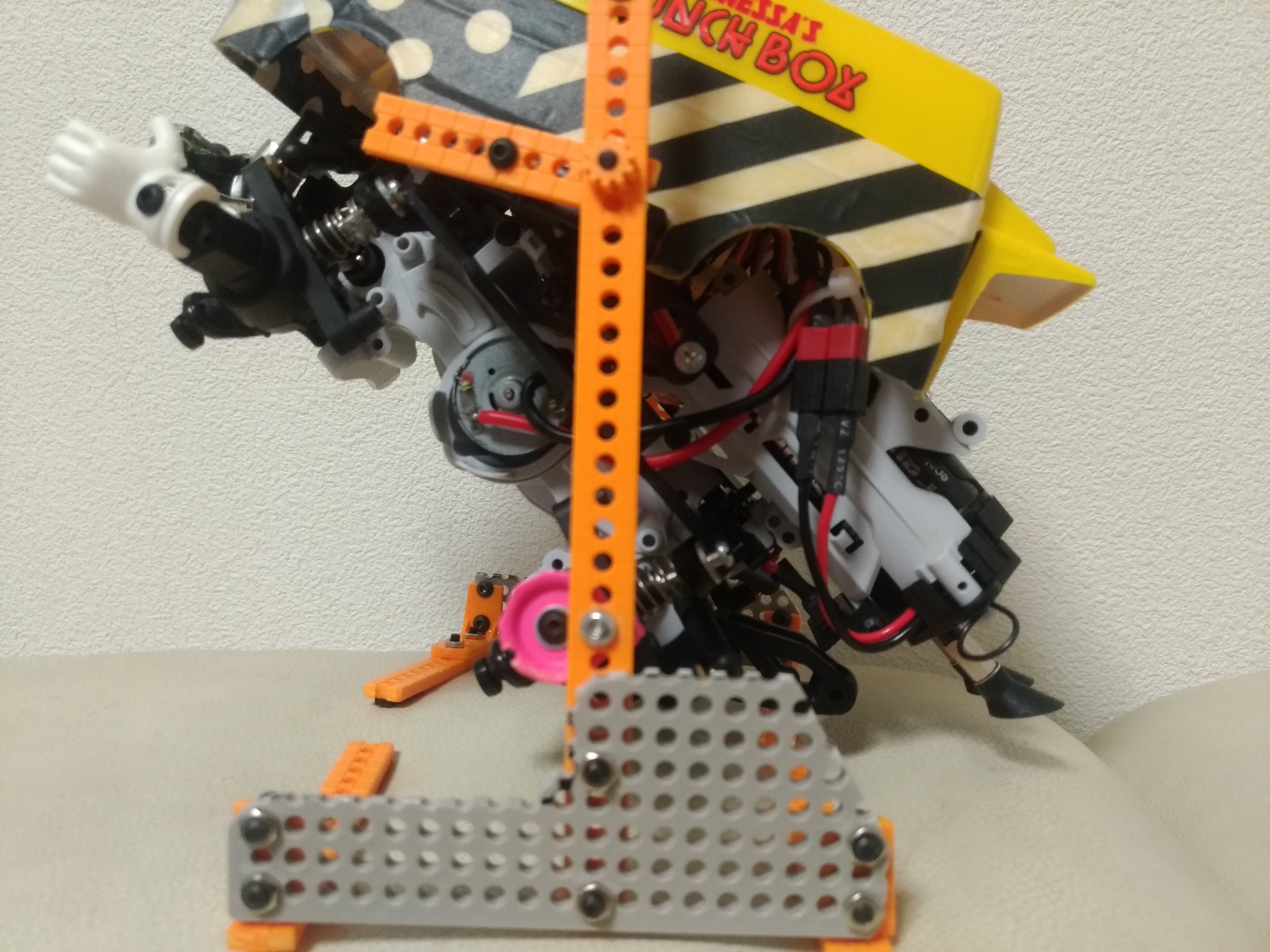
完成
と言う訳で完成しました!
(リアのトー角も真っ直ぐになるよういじったかもですが正解はわからないので各自調整してください)

まとめ
意外と簡単に出来ましたよね?車仕様に戻すのも簡単なので是非お試しあれ!